 Xilinx
Xilinx|
版主: 51FPGA |



ZedBoard学习手记(四)为使用Linux系统做准备——建立Bootloader及设备树
[您是本帖的第2170位阅读者]|
啸风
最后登陆时间:2015-01-28 20:37:59 |
在上一篇博文中,我已经介绍了建立AXI总线自定义外设的全过程,包括Verilog逻辑部分,和裸机软件部分。裸机控制外设是非常简单的,与普通的单片机并无二异,但仅仅有裸奔代码还远远无法发挥Cortex-A9硬核的作用,毕竟Zynq芯片集成了一颗最高能跑到1GHz的双核CPU(ZedBoard上的XC7Z020只能到800MHz)。并且ZedBoard上配备了Gigabit Ethernet、HDMI和USB OTG接口,不运行操作系统岂不浪费。 有朋友想要在ZedBoard上做WinCE,但这方面的资料极为稀缺,而WinCE又是体积庞大、版权成本很高的操作系统,于是开源有小巧的嵌入式Linux就成了首选。之前兔子为了做出图形界面,还致力于移植桌面型的Linaro Ubuntu系统,不过ADI给出的参考例子未经优化奇卡无比,Xillinux正式版迟迟未现又只支持色彩度很低的简易VGA接口(ZedBoard上的VGA甚至到不了16位色),于是兔子不得不放弃之前的工作,重新启用ZedBoard出厂默认的轻量级Linux上。这个系统没有图形桌面,但已包含了网卡、HDMI驱动和其他基本功能,足够使用了。 想要在Linux下控制外设,最重要的一环就是驱动了,但在动手写驱动之前,先要做些准备工作。为了减少工作量,我们就直接修改ZedBoard的出厂Demo,加入之前完成的my_gpio外设,并通过U-Boot实现Bootloader功能。这个Demo的源工程可以在Digilent网站的ZedBoard页面找到: http://digilentinc.com/Products/Detail.cfm?NavPath=2,400,1028&Prod=ZEDBOARD 点击下面的Download,可以下载到ZedBoard_OOB_Design.zip文件,这个压缩包里包含了XPS工程、U-Boot文件、Linux内核配置文件、DeviceTree源文件、rootfs等。README.txt中有相近的操作说明,建议通读一遍。
ZedBoard上默认的XPS系统工程位于hw\xps_proj文件夹下,双击system.xmp打开工程,按照之前所说的方法,将my_gpio外设IP核导入到工程中。 传送门:ZedBoard学习手记(二) 开发自定义AXI总线外设IP核——以LED和开关为例
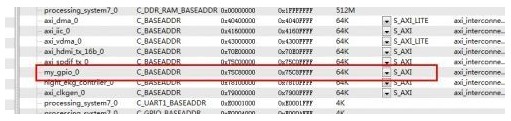
之后,查看一下XPS是否为我们的外设分配了地址空间,如果没有,就需要手动设置一个地址,这里我们设成0x75C80000,空间大小为AXI设备统一的64K。
按照ZedBoard学习手记(二)中的方法设置总线连接,结果如下图:
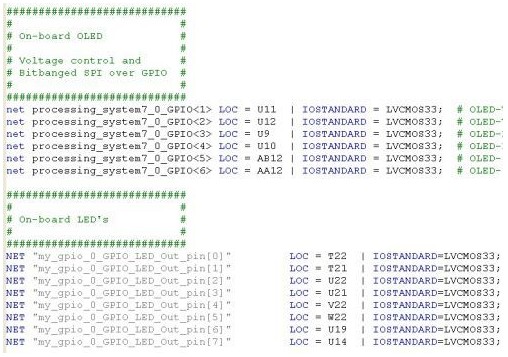
修改xps_proj\data\system.ucf文件,为my_gpio外设分配外部引脚(ucf约束文件中的引脚名称和Ports中的一定要相同,已经有不少网友在这里出过问题了)。另外我们分配的引脚占用了原来ARM的GPIO 引脚位置,应在XPS的Port列表里将processing_system7_0_GPIO数量设为[0:6]或干禁用,以除后患。
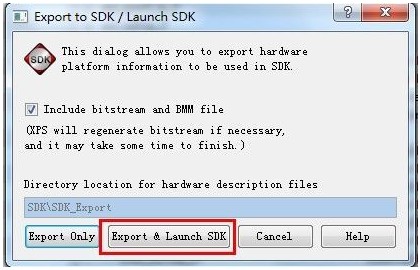
完成后先单击Generate BitStream生成配置数据,再点击Export Design,选Export & Launch SDK将硬件信息导出到SDK中。
在SDK里,新建一个C工程,不同于裸机的HelloWorld,这次要建立的是Bootloader,因此选择FSBL工程,即First Stage Bootloader,用实现U-Boot之前的初始化和启动工作。其他选项默认即可。
编译一下工程,完成后SDK会生成FSBL的elf文件,另外加上从XPS导出的System.bit,以及我们在第一篇文章中编译生成的u-boot.elf,就可以生成用来实现SD卡启动系统的完整Bootloader文件了。 u-boot.elf在ZedBoard_OOB_Design中包含,不过这个兔子没试过,通过Xilinx U-Boot编译生成u-boot.elf的方法请见:ZedBoard学习手记(一)First Step——建立Xilinx交叉编译环境
集齐这三个文件之后,点击Xilinx Tools→Create Boot Image,添加到列表中,选择一个输出路径,就可以创建Bootloader了。
SDK会在输出路劲生成u-boot.bin文件,将其改为BOOT.bin,拷贝到SD卡中,为ZedBoard板配置合适的跳线。这时再打开ZedBoard电源,Bootloader会初始化PS,用BitStream配置PL(包含了我们创建的my_gpio外设),并将操作权移交给U-Boot。U-Boot会自动加载Device Tree、Linux内核镜像和RootFS,最终启动Linux。 ZedBoard出场时SD中还带有zImage、devicetree和rootfs文件,这些文件都可以采用原有的,直接用Xilinx交叉编译工具编译写好的C语言驱动就可以在这个系统上运行并控制外设了。 当然,如果你想自己编译内核,或者不想采用静态物理地址的方式调用外设,就需要再往下进行一步,注意这一步对于Linux下控制AXI总线自定义外设并非必要。 为了给有兴趣的朋友继续深入研究做个铺垫,这里兔子就讲一下编译ZedBoard上运行的Linux内核和设备树吧。当然这个方法也详细记录在ZedBoard_OOB_Design的README文件中。 在PC的Linux环境下(兔子这里是Ubuntu)通过Git指令下载Digilent Linux内核源码: git clone git://github.com/Digilent/linux-3.3-digilent.git
切换到ZedBoard Branch: cd linux-3.3-digilent git checkout -b zedboard_oob v3.3.0-digilent-12.07-zed-beta
将ZedBoard_OOB_Design中的.config文件拷贝到源码目录下,然后编译内核(指的是ZedBoard_OOB_Design所在目录): make
生成的内核镜像zImage 位于/arch/arm/boot/文件夹下。 之后修改devicetree_ramdisk.dts文件,加入my_gpio外设信息。 /******* LED & Swtich Controller ******/ my_gpio@75c80000 { compatible = "xlnx,my_gpio-1.00.a"; reg =; xlnx,dphase-timeout =; xlnx,family = "virtex6"; xlnx,c_num_reg =; xlnx,c_num_mem =; xlnx,s-axi-min-size =; xlnx,c_slv_awidth =; xlnx,c_slv_dwidth =; xlnx,use-wstrb =; };
通过下面指令生成设备树,同样Copy到SD卡中: ./scripts/dtc/dtc -O dtb –I dts –o ./devicetree_ramdisk.dtb \ /linux/devicetree_ramdisk.dts
这个设备树文件有网友说是将驱动加入到内核中用的,但兔子以为不然。如果不想通过静态设备物理地址(上面的0x75c80000)来加载驱动,就可以根据这个设备树信息(具体是通过xlnx,my_gpio-1.00.a字串)来动态识别设备。 具体的方法有兴趣的童鞋可以一试,下次我们就要开始正式编写my_gpio外设的Linux驱动了。窗外还在下着雨,今天哪儿也去不了了,眼看周日和同事去箭扣长城的计划也要泡汤……话说这两天貌似不止北京在降温,大家可要注意保暖啊:D。 ——转自网友 懒兔子 关键词:ZedBoard 手记 |
 一粒沙里看世界。
此贴由renazan2000于2013-06-09 10:38:33最后编辑
|
|






| 共1条 1/1 1 |